边缘检测
本文最后更新于 2025年3月25日 下午
边缘
一般来说,边缘是图像像素变化大的区域,但是这并不绝对
如图所示,两个位置像素一样,但是我们会天然的把它区分黑白,这得益于我们对图像的整体理解。基础的图像滤波只考虑局部的因素,如果要得到更好的效果需要进行整体考虑。
边缘可以用来区分物体,是图像分类、图像裁剪、图像拼接等操作的基础。
梯度
梯度定义:

含义: 是一个向量,表示沿着这个方向导数获得最大值,也就是变换最快
离散化表示
边缘检测
Sobel, Prewitt, Robert
Sobel算子为:
Prewitt算子和sobel算子格式相同,只是2变成了1
Robert算子:
水平检测和垂直检测结果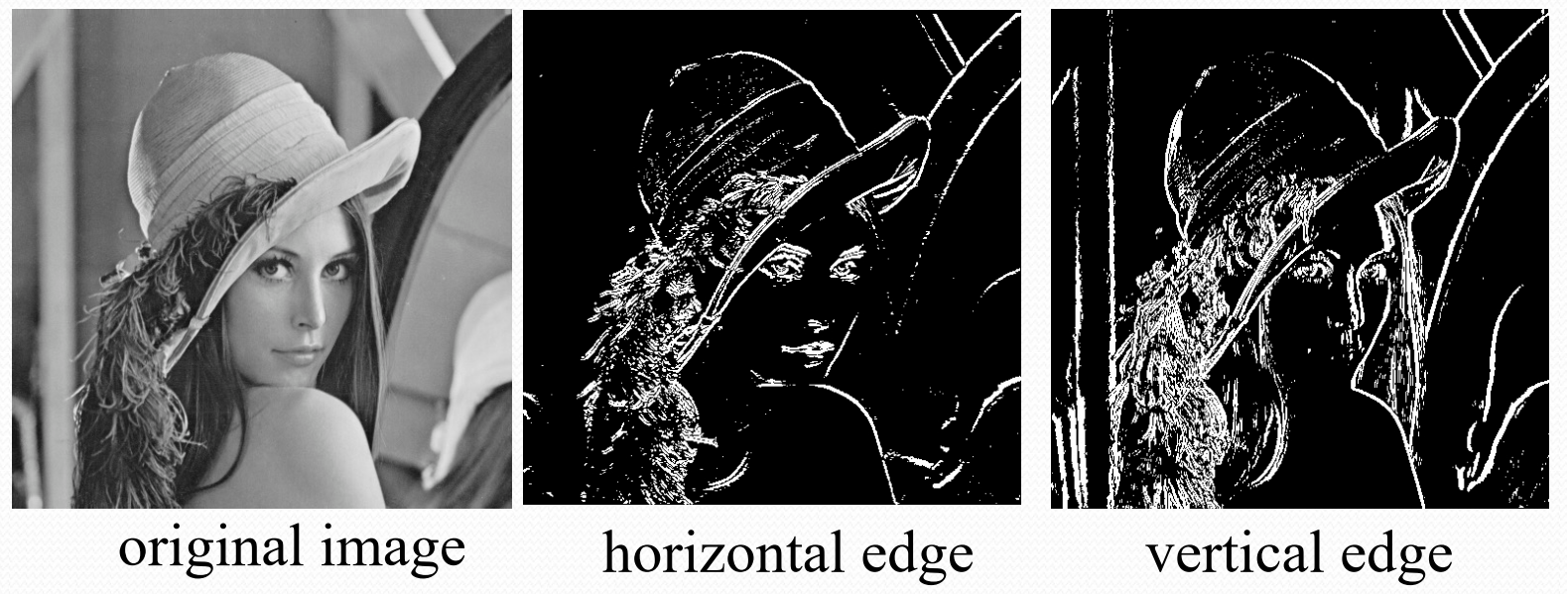
高斯-拉普拉斯(LOG)算子
拉普拉斯算子是二阶滤波器,它的形式为:
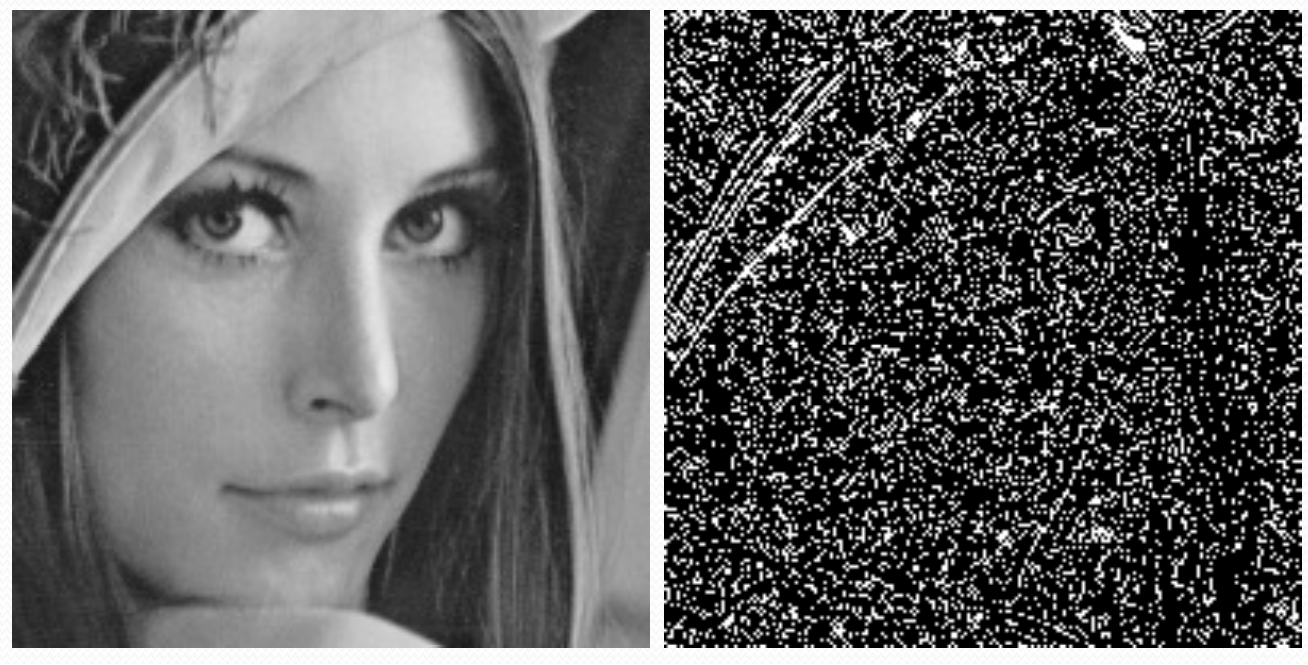
二阶滤波器的边缘如图所示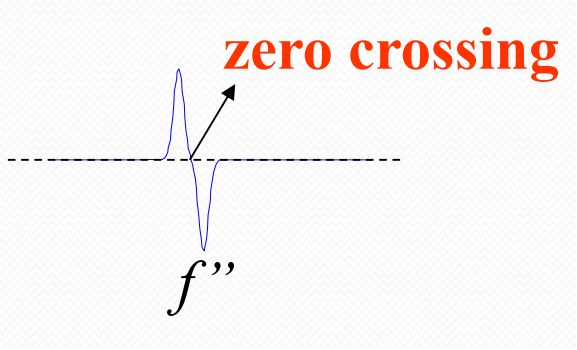
这种方式的问题是只要过零点就算边缘,无论多小的变化都会有一个响应,因此它的效果是很差的。
为了解决这个问题,可以首先使用高斯滤波器进行平滑处理,然后在使用拉普拉斯算子进行边缘检测。
实际上可以将这两个步骤进行合并
高斯算子为:
其中是方差,方差越小图像越平缓
它的离散形式为: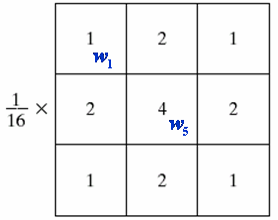
这个形式其实是中心点为原点计算出来的,计算结果为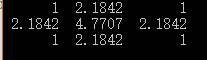 具体可看
具体可看
1 | |
然后将两种算子结合可以得到高斯拉普拉斯算子
我们可以选取一个并选择一个方形核再使用上面所说的方法进行拟合
DOG算子
DOG其实是LOG的近似,它由两个高斯函数复合而成
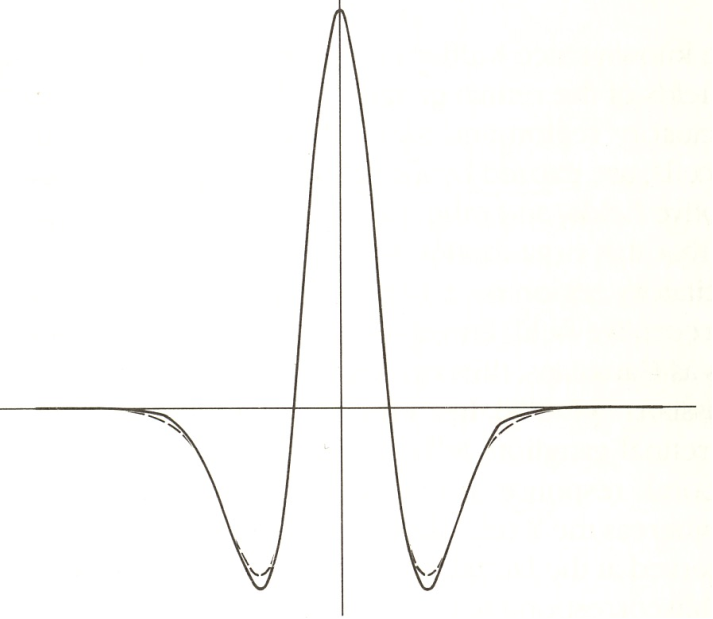
两个曲线一个是LOG一个是DOG
DOG算子表达式
Canny边缘检测
前面的算法找到的边缘都是一些离散的点,并且边缘也不只一个像素,这种边缘对于一些处理来说不是很方便。canny算法中认为好的边缘要有如下条件:
- 好的检测: 检测出更多的事迹边缘
- 好的定位: 标识的边缘要和实际边缘接近
- 好的响应: 相同边缘只被标识一次
步骤:
- 高斯滤波
计算梯度和方向:
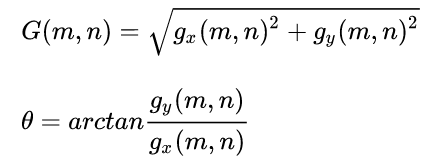 上面两个公式分别计算梯度值和梯度方向。
上面两个公式分别计算梯度值和梯度方向。
具体来说,假设是sobel算子,那么是\begin{bmatrix}
1 & 2 & 1\
0 & 0 & 0\
-1 & -2 & -1
\end{bmatrix}
$$非极大值抑制: 非极大值抑制目的是为了得到好的响应(相同边缘只被标识一次),因此一些同样是边缘但是强度没那么大的将被抑制到0.具体做法为
将梯度强度和梯度方向上的前后两个像素进行比较
- 如果当前梯度强度比另外两个点大,则保留为边缘点,否则抑制
通常为了精确计算,还需经过插值,如:
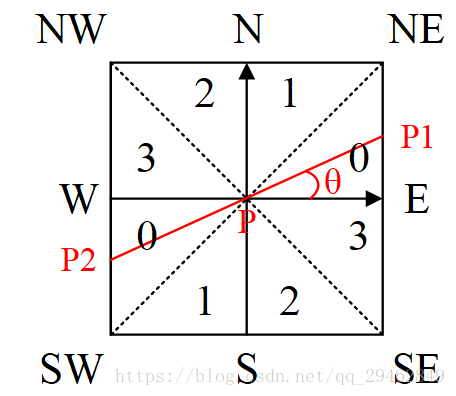
我们采用P1, P2两个点进行计算,P1 P2两个点的获得过程为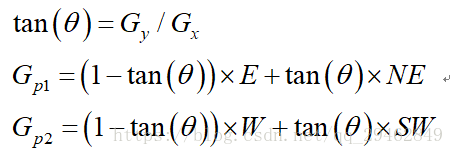
注意: 图中是斜率小于0的情况,因为原点在左上角
- 双阈值检测:经过上面的步骤之后还是会有一些噪声或颜色导致的边缘。为了消除这些边缘,认为设定高低梯度阈值, 记为。假设t为该点的梯度强度, 如果 标记为强边缘像素,如果 标记为弱边缘像素,如果则抑制。的一种取值为
- 抑制孤立低阈值点: 弱边缘像素是否是真正的边缘还有些争论,我们认为强边缘点一定是变元,而边缘是连续的。根据这个思想,我们可以检测所有弱边缘点,如果弱边缘点附近8个点中没有一个强边缘点则将其抑制。
FDOG算法
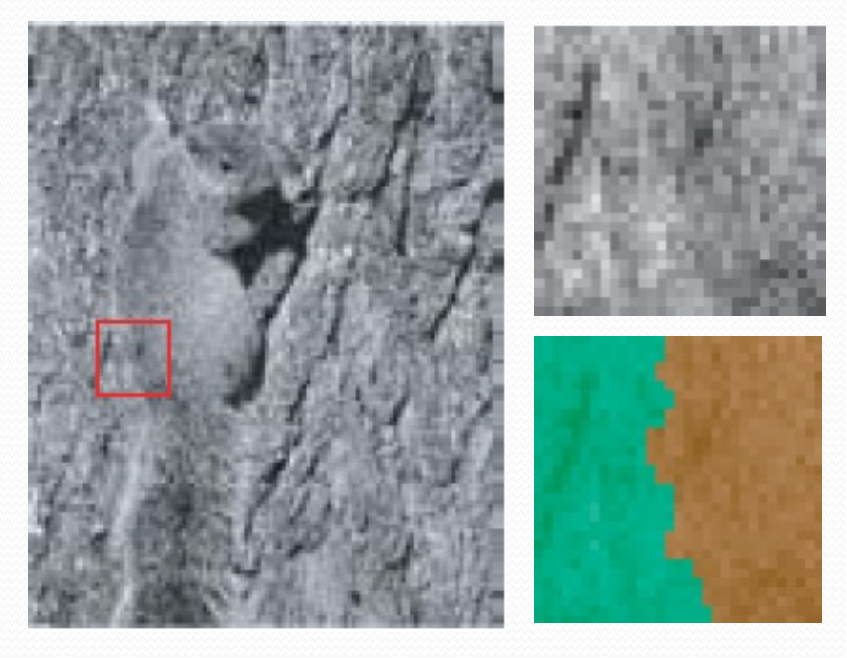
这张图像从整体上来看是一个松鼠,但是从右边局部来看却几乎看不出松鼠的边缘,前面说的算法最终结果中也不会有松鼠。这是因为只考虑局部的信息。
FDOG(Flow-base DOG)算法会沿着边界方向进行检查,如果发现边界的边缘还是边界则认为这是一个边界。
具体过程为:
- 获得ETF: 计算每个像素点的梯度,获得梯度的方向(梯度计算在上面已经说明)。然后获得梯度的垂直方向,也就是(-y, x)。
ETF平滑:
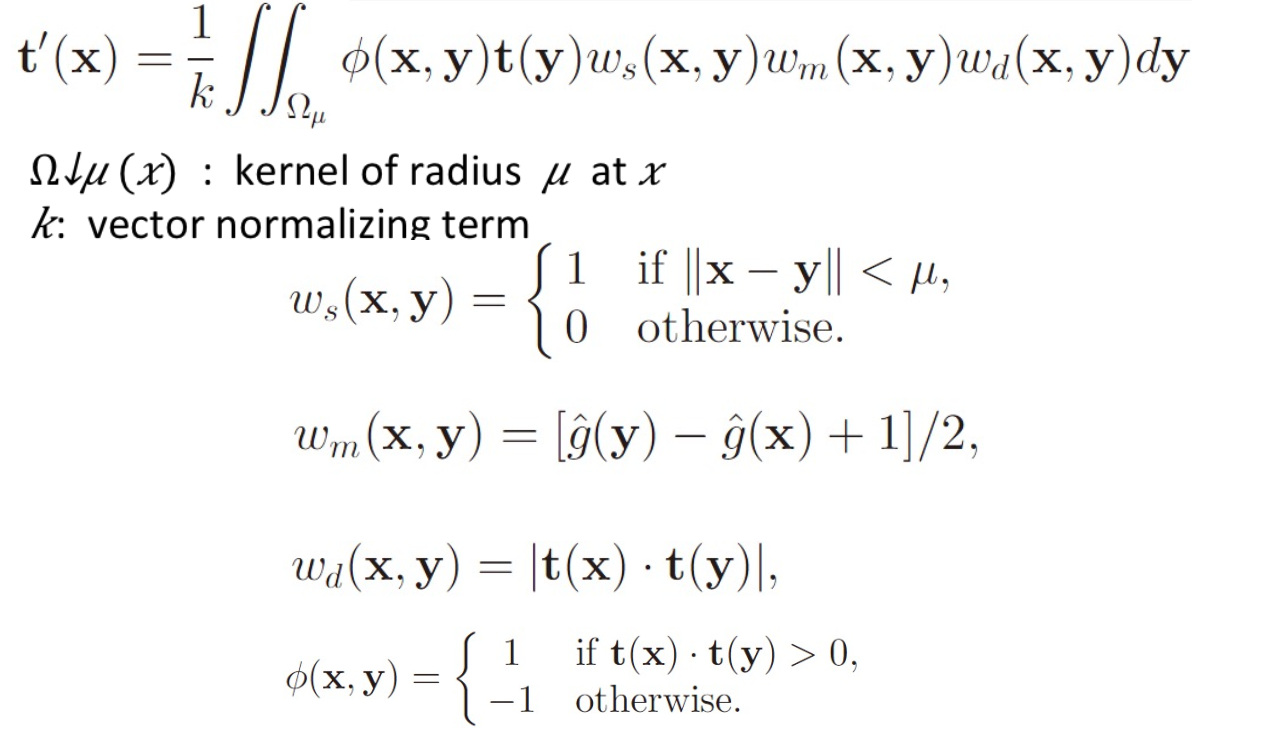 其中g是梯度的强度,t是梯度的方向
其中g是梯度的强度,t是梯度的方向这个公式的含义是将周围的梯度进行处理后附加到当前梯度上。为了节省计算量,一般只取竖直和水平两个方向进行计算,代码为该文件的Smooth函数
- 生成边缘:
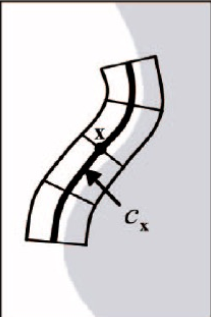 如图所示,我们需要寻找图中连续的边缘,可以首先使用DOG算法找出可能的边缘位置,然后再使用前面ETF计算的边缘方向查找边缘方向上的点是否是边缘,如果是则标记当前点为边缘。
如图所示,我们需要寻找图中连续的边缘,可以首先使用DOG算法找出可能的边缘位置,然后再使用前面ETF计算的边缘方向查找边缘方向上的点是否是边缘,如果是则标记当前点为边缘。 最终再进行阈值筛选
最终再进行阈值筛选
- 迭代: 如果觉得一次运行效果不好,可以把生成的边缘加到原图中增强边缘再重复运行算法