插值
本文最后更新于 2025年3月25日 下午
基础
插值问题是给出一些离散的点,通过这些离散的点可以模拟出原曲线。
形式化定义:
设y = f(x) 在区间[a, b]上有定义,且已知在点上的值,若存在一个函数P(x)使得
P(x)则为f(x)的插值函数,[a, b]为插值区间。
多项式插值
构建多项式P(x) = 来模拟f(x)。假设有[a, b]上有n+1个已知点。根据定义有:
它是齐次非线性方程组且为范德蒙德矩阵,因此它的行列式的值为
因此我们可以得知行列式不为0,所以P(x)的解是存在且唯一的
这种方法非常不稳定,有一点小的扰动就可能导致结果天差地别
1 | |
拉格朗日插值
给定两个点,他们的两点式为:
我们可以把y的系数作为一个函数,即.有一些特殊的性质
这符合我们插值函数的需要,即x=时y=。我们将它扩展就可以得到拉格朗日插值多项式了。
其中是系数函数,它具有时=1,时的性质。
因此范德蒙德矩阵为:
我们可以引入记号
1 | |
误差估计
定理: 设 在[a, b]上连续, 在(a, b)内存在,且是符合条件的插值多项式,则
其中在(a, b)中。并且的最大值容易求,所以关键是
证明: 根据定义,在这些插值点上值一定是0,因为我们可以把改写为
将x看成[a, b]上的固定点,做函数
因此$\phi(t)$在$x_0 , x_1 … x_n$和x处为0.根据罗尔定理,在$\phi^{\prime}(t)$在$\phi(t)$两个零点之间至少有一个零点,由此类推.$\phi^{n+1}(t)$在(a, b)内至少有一个零点
根据这个公式,我们可以得出$f^{n+1}(\xi)$的值是0就没有误差,因此多项式的级数只需要大于f(x)的求导次数就可以无限逼近
牛顿插值
牛顿插值多项式是根据点斜式进行的。点斜式:
他可以看成零次插值的$P_0 (x) = f(x_0 )$的修正,即$P_1 (x) = f(x_0 ) + a_1 (x - x_0 )$
而三个点的二次插值可以表示为$P_2 (x) = f(x_0 ) + a_2 (x - x_0 )(x-x_1 )$
其中$a_2$为:
均差
根据上面我们可以得出一些规律.我们称$f[x_0 , x_k ] = \frac{f(x_k ) - f(x_0 )}{x_k - x_0}$为一阶均差,$f[x_0 , x_1 , x_k ] = \frac{f[x_0 , x_k ] - f[x_0 , x_1 ]}{x_k - x_1}$为二阶均差,推广为:
性质:
- k阶均差可表示为函数值的线性组合,即
这个性质表明均差和节点的排列顺序无关,成为均差的对称性,即$f[x_0 , x_1 , \dots , x_k ] = f[x_1 , x_0 , x_2 , \dots , x_k ] = \dots = f[x_1 , \dots , x_k , x_0 ]$
因此可以得出:
- 若f(x)在[a, b]上存在n阶导数,且节点$x_0 , x_1 , \dots , x_n \in [a, b]$,则n阶均差与导数的关系为
牛顿插值多项式
根据均差定义我们可以得到:
最终的式子为:
最后一项是插值余项和前面说的插值余项形式相同。
均差计算可以使用均差表
1 | |
查分形式的牛顿插值公式
实际应用中经常会用到等距节点$x_k = x_0 + kh \quad (k=0,1,\dots , n)$的情形,这里h成为步长,此时插值公式可以简化。
查分是微分的离散形式,$\Delta fk = f{k+1} - f_k$,称$\Delta f_k$为以h为步长的一阶差分。类似的有
为了表示方便,引入两个常用的算子:
I称为不变算子,E称为位移算子,因此可以推出
其中$\binom{n}{j}$也就是$C_n^j$
均差和差分的关系
均差和导数的关系
我们可以使用差分表进行计算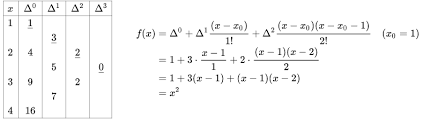
根据牛顿插值公式和均差和差分的转换关系,我们可以得到
埃尔米特插值
埃尔米特插值除了要求函数值必须和原函数相等之外,还要求在插值点上一阶导数和原函数相等。
例如两个点的埃尔米特插值模式为:
并且要求
并且还要求$\alpha_k (x_k ) = 1$ 为其他插值点和导数都为0,如$a_k^{\prime} (x_k ) = 0$
而$\beta$函数只有在对应点的导数值才是1,其他都是0
联立方程可以求得最终结果为:
分段低次插值
根据余项的定义可知,误差的最大值和n阶导数的最大值相关。有些函数导数级次越高导数飞速增长,会导致曲线在端点附近震荡导致不准确。因此有时候采样点多了结果反而更差,这和我们的常识不符。为了解决这个问题,提出了分段插值。
分段线性插值
也就是每两个点进行一次插值,即每两个点做一条直线段,这种方法在采样点无限多的情况下可以无限逼近原曲线。
假设有n个采样点,采样点由递增,在$[xk , x{k+1}]$的区间内表达式为:
我们可以得到它的误差限为$\frac{M_2}{8} h^2$,其中$M_2 = \underset{a \le x \le b}{max}|f^{\prime \prime}(x)|$
1 | |
分段三次埃尔米特插值
和上面一样,只是插值函数变成了埃尔米特插值函数,并且此时我们需要知道导数
1 | |