矩阵求解
本文最后更新于 2024年10月1日 上午
直接解法
高斯消去法
高斯消去法是先将矩阵变为上/下三角矩阵,然后使用回带法进行求解,例如
因此$x_3 = 3 , x_2 = 2 , x_1 = 1$
然后要把第二列消0,也就是后面的行都减去第二行的$\frac{a{i2}}{a{22}}$倍。
最终的公式为:
其中k代表当前处理第k行
求出上三角矩阵后进行回代计算
因为里面有除法,因此主对角线上的元素不能为0。但是由于可以做初等行列变换,因此实际的要求是顺序主子式都不为0。
第一个顺序主子式是$a{11}$,第二个顺序主子式是$a{11}, a{12}, a{21}, a_{22}$的行列式。
我们每次使用除法时是使用对角线元素作为分母,如果分母很小可能会导致最终误差较大,因此可以使用行列变换将该列的最大元素移到当前处理行,称为列主元消去法
三角分解
我们目标是求解Ax=b,其中A可以分解成L矩阵和U矩阵,也就是LUx=b.
其中L是一个下三角矩阵,U是一个上三角矩阵,设Ux=y,因此求解过程为:
- Ly=b,求y
- Ux=y,求x
让LU矩阵相乘可以得到原矩阵,根据这个可以得到原矩阵和LU矩阵的转化关系。
- $u{1i} = a{1i} , l{i1} = a{i1}/u_{11}$
- $u{ri} = a{ri} - \sum{k=1}^{r-1} l{rk} u_{ki} i=r, r+1,\dots , n$
- $l{ir} = (a{ir} - \sum{k=1}^{r-1}l{ik}u{kr})/u{rr} , i=r+1,\dots ,n且r!=n$
然后再进行回代
迭代法
引例:求解方程 3x - $e^x$ = 0
首先将方程变形可得x = $e^x / 3$
然后令$x_0 = 0$,将$x_0$代入右边,可以得到一个值,这个值赋值给$x_0$,然后重复上述过程。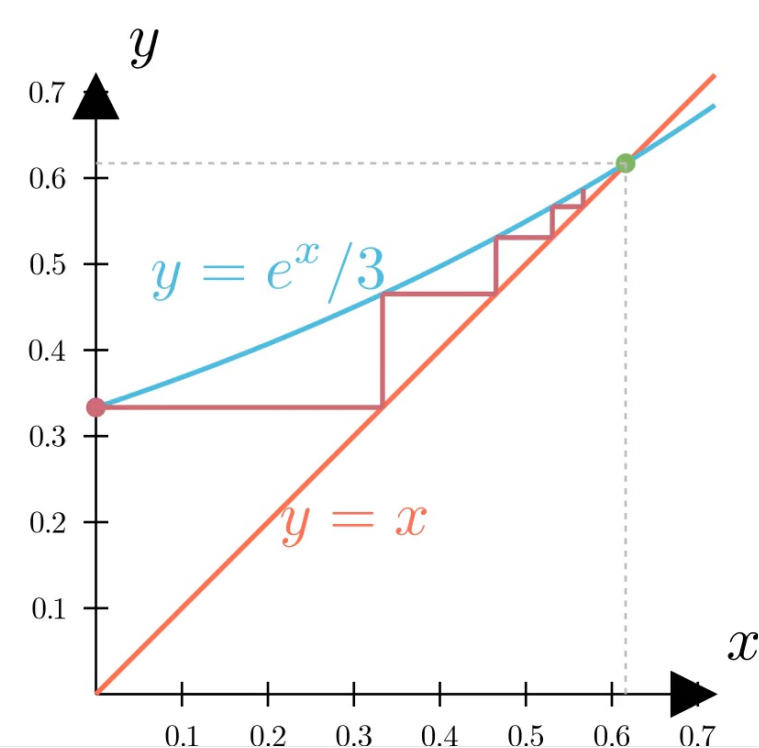
因为最终解是两条曲线的焦点,我们可以发现当$e^x / 3$大于x时会让x增大,反之会让x减小,最终会不断靠近真实解。
而对于方程组来说我们可以将Ax=b转化成x=Bx + f的形式,然后不断求解右边然后代入x直到误差小于某一个值。
总体流程为$(M - N)x = b => Mx = Nx + b => $x = M^{-1} N x + M^{-1} b$
迭代法敛散性
- 向量的极限:$\underset{k->\infty}{lim}a{ij}^{(k)} = a{ij}$,则称该向量序列收敛于A,记作$\underset{k->\infty}{lim} Ak = A$,其中$a{ij}^{(k)}$其实就是$A\times A \times A \dots A$的结果
- 矩阵的算子范数:$||A||_v = \underset{x \ne 0}{max} \frac{||Ax||_v}{||x||_v}$
- 矩阵的弗洛贝尼斯范数:$F(A) = ||A||F = (\sum{i,j=1}^{n} a_{i, j}^2 )^{\frac{1}{2}})$
- $||A||{\infty} = \underset{1 \le i \le n}{max}\sum{j=1}^{n} |a_{ij}|$
- $||A||1 = \underset{1 \le j \le n}\sum{i=1}^{n} |a_{ij}|$
- $||A||2 = \sqrt{\lambda{max} (A^T A)}$
- 三个命题等价
- $\underset{k->\infty}{lim} B^k = 0$
- $\rho (B) < 1$, $\rho(B)$是B的谱半径,谱半径也就是B最大的特征值
- 至少有一种从属矩阵范数,使得$||B||_{\varepsilon}$ < 1
定理: 迭代法收敛的充要条件是矩阵B的谱半径$\rho(B) < 1$
定理2: 迭代法收敛的充分条件是某种算子范数||B|| < 1
雅克比,高斯-赛德尔迭代法
雅克比迭代法
将A分成D,L, U三部分,其中D是对角阵,L是下三角矩阵,U是上三角矩阵
(D-L-U)x = b => Dx = (L-U)x + b => x = $D^{-1} (L - U) x + D^{-1}b$
因为D是对角阵,因此它的逆就是对角元素的倒数,因此求解公式为:
高斯赛德尔
他和雅克比不一样的地方在于只将U矩阵移到了右边,也就是
(D-L-U)x = b => (D-L)x = Ux + b => $(D-L)x^{(k+1)} = U x^{(k)} + b => Dx^{k+1} = Lx^{(k+1)} + U x^{(k)} + b$
将$x^{(k+1)}$移到了右边看似让矩阵无法求解,但是由于L的特殊性让本次迭代时可以利用前面计算的信息
求解过程为:
- 严格对角占优矩阵: 如果$|a{ii}| > \sum{j=1 ,j\ne i}^{n}|a_{ij}|$,则称该矩阵为严格对角占有矩阵
- 弱对角占优矩阵:将上面的大于号替换成大于等于
- 可约矩阵: 如果存在一个置换矩阵P使得
其中$A{11}和A{22}$都是方阵,则成为可约矩阵
如果A为强对角占优矩阵,或者A是弱对角占优不可约矩阵,则Ax=b的雅克比迭代法和高斯赛德尔迭代法收敛
超松弛迭代法
超松弛迭代法是在高斯-赛德尔迭代法上进行一些改进,它在$x^{(k+1)}$上添加了一些阻尼
如果$\omega > 1$,则成为超松弛迭代
而他的计算式为:
要注意后面一个是$j = i$而不是$j = i + 1$
最速下降和共轭梯度
首先定义优化函数
而我们可以证明$x^$为Ax=b的解的充要条件是$\phi (x^ ) = \underset{x \in R^n}{min} \phi (x)$
因此我们将目标从求解Ax=b转向了优化$\phi (x)$
最速下降法
使用梯度下降法$x^{(1)} = x^{(0)} + \alpha p^{(0)}$,并且最速下降法要求


而我们对$\alpha$求导=0可得$\alpha_k = -\frac{(Ax^{(k)}-b, p^{(k)})}{(Ap^{(k)}, p^{(k)})}$
由于$p^{(k)}%是下降方向,我们知道沿负梯度方向下降下降速度最快,而这个函数的梯度为$Ax-b$,因此可以得知$p^{(k)} = b - Ax = r(k)$
因此
但是当r很小时可能会出现舍入误差导致计算不稳定。
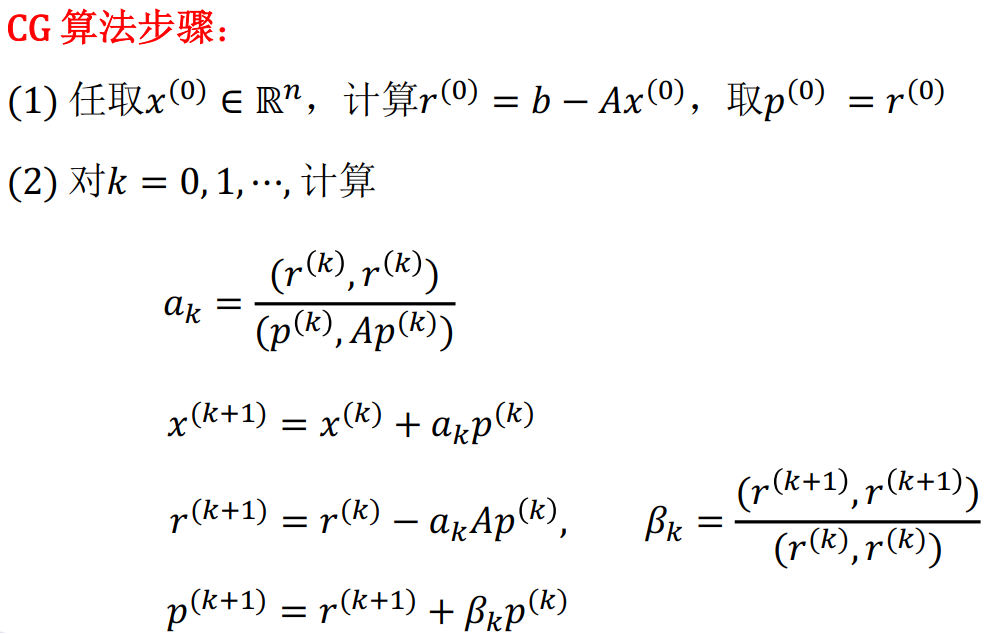
共轭梯度法
共轭梯度法的关键在于在$p^{(k)}$上添加了一些阻尼,也就是下面式子中的$\beta$