Tomasulo算法
本文最后更新于 2024年10月1日 上午
冲突
- 结构冲突: 由于硬件资源争夺导致的冲突,例如同时两条指令产生访问请求,或者ICache和DCache同时对L2 Cache产生访问请求。
- 数据冲突: 数据冲突分为写后读冲突(RAW),写后写冲突(WAW),读后写冲突(WAR)。写后读可以认为写在读之后
- 控制冲突: 主要是分支指令导致的冲突
其中结构冲突和控制冲突无法避免,我们需要想办法消除数据冲突
1 | |
其中写后读相关是无法避免的,在乱序执行中必须要等待写完成才可以读,在顺序处理器中使用前推解决。而写后读相关和写后写相关在顺序处理器中是不存在的,但是在乱序处理器中可能存在问题。
例如写后写相关,本来存储器中最终保存的是SUB的数据,但是现在保存的是ADD的数据。而读后写相关调换位置就变成了写后读相关。
Tomasulo算法
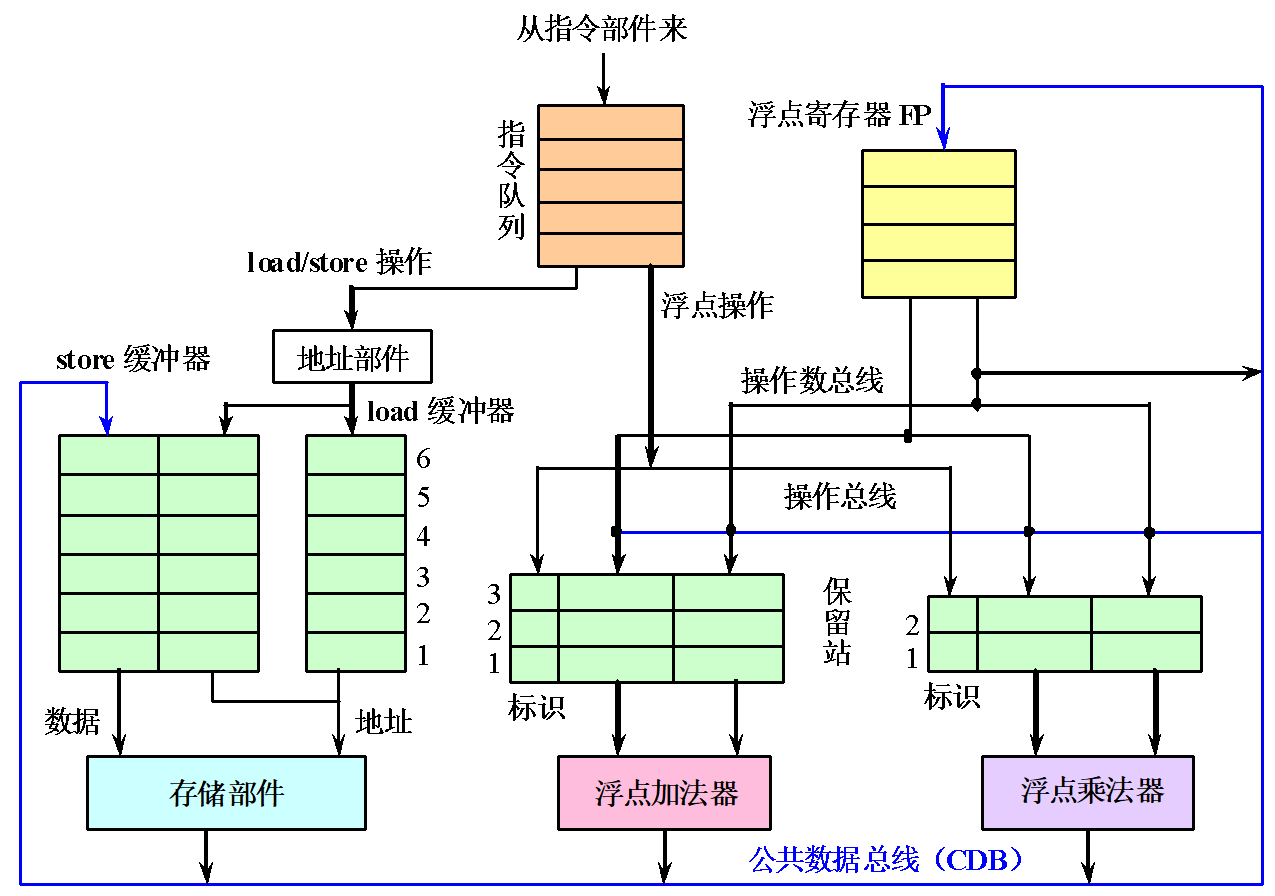
大致步骤:
- 流水线前端的指令信息保存在指令队列中
- 根据指令类型的不同发送给不同部件的保留站中,如果保留站满则不能发送。
- 发送到保留站时,需要进行寄存器重命名
- 运算后通过公共数据总线发送给保留站,寄存器状态队列,寄存器堆
保留站中字段信息:
- busy: 当前保留站是否被使用
- op: 操作类型
- $v_j , v_k$: 源操作数值
- $q_j , q_k$: 源操作数编号,也就是rs,rt。如果不需要该操作数或者操作数准备完毕则设为0,否则设为register result status中的编号
寄存器结果状态表中的信息:
它表示当前寄存器结果的位置,可以为保留站编号或者是0(表示当前最新值在寄存器堆中)
指令存入保留站过程:
- 检查源操作数在寄存器结果状态表中的值,如果不为0表示当前值还等待计算,因此将$q_j , q_k$置为相应保留站编号。否则将$q_j ,q_k$置为0并且从寄存器堆中取出值放到$v_j , v_k$中
- 如果当前需要写入目的寄存器,则将当前分配的保留站编号写入寄存器结果状态表的rd位置。如果是load或store命令,则还需要判断写入地址是否相同,如果相同也要添加保留站编号(例如先读后写,如果不判断地址冲突,那么写命令可能先执行,读出来的就是未来的数据了)
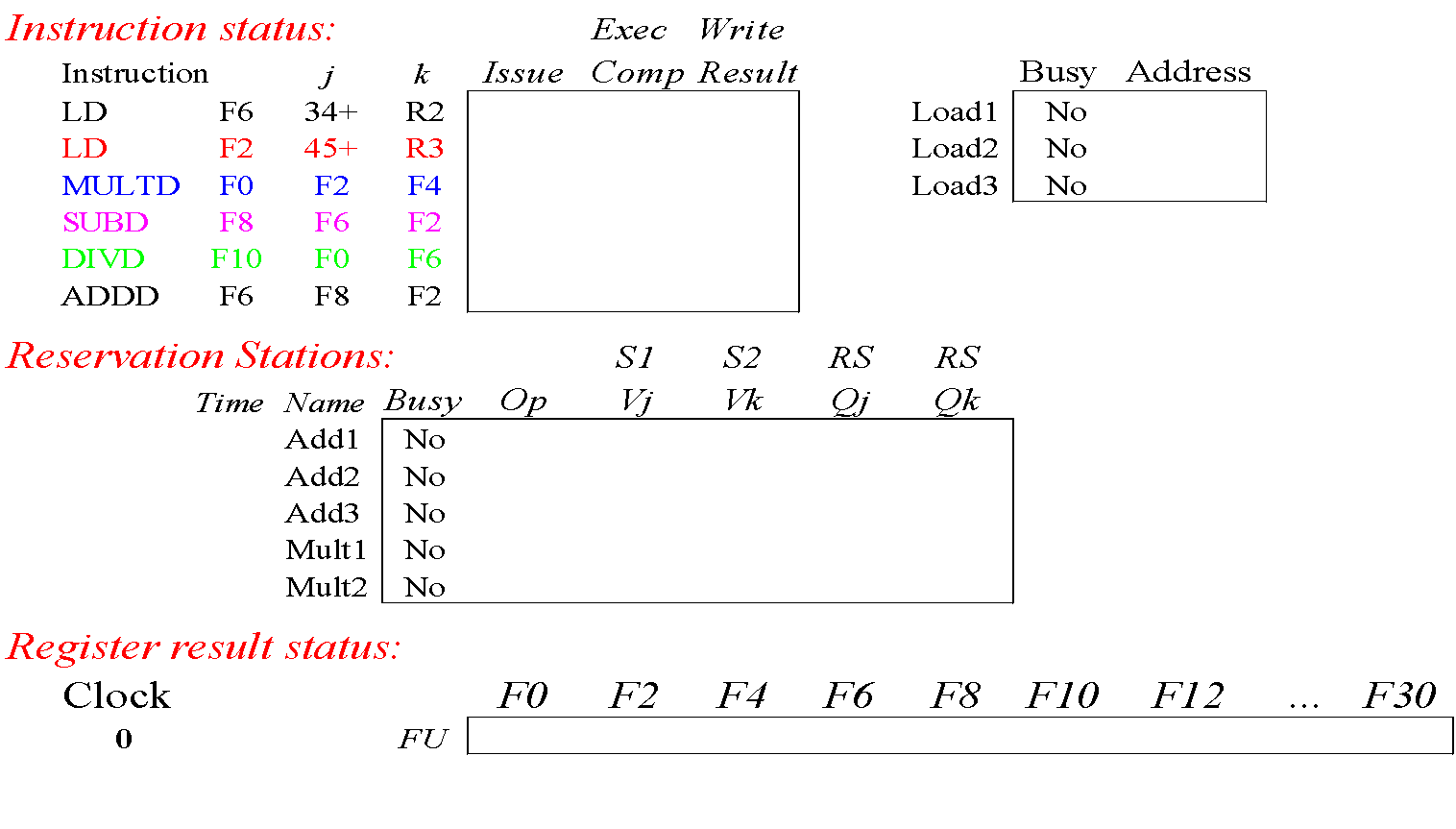
例:
前面两条读指令结束后如图
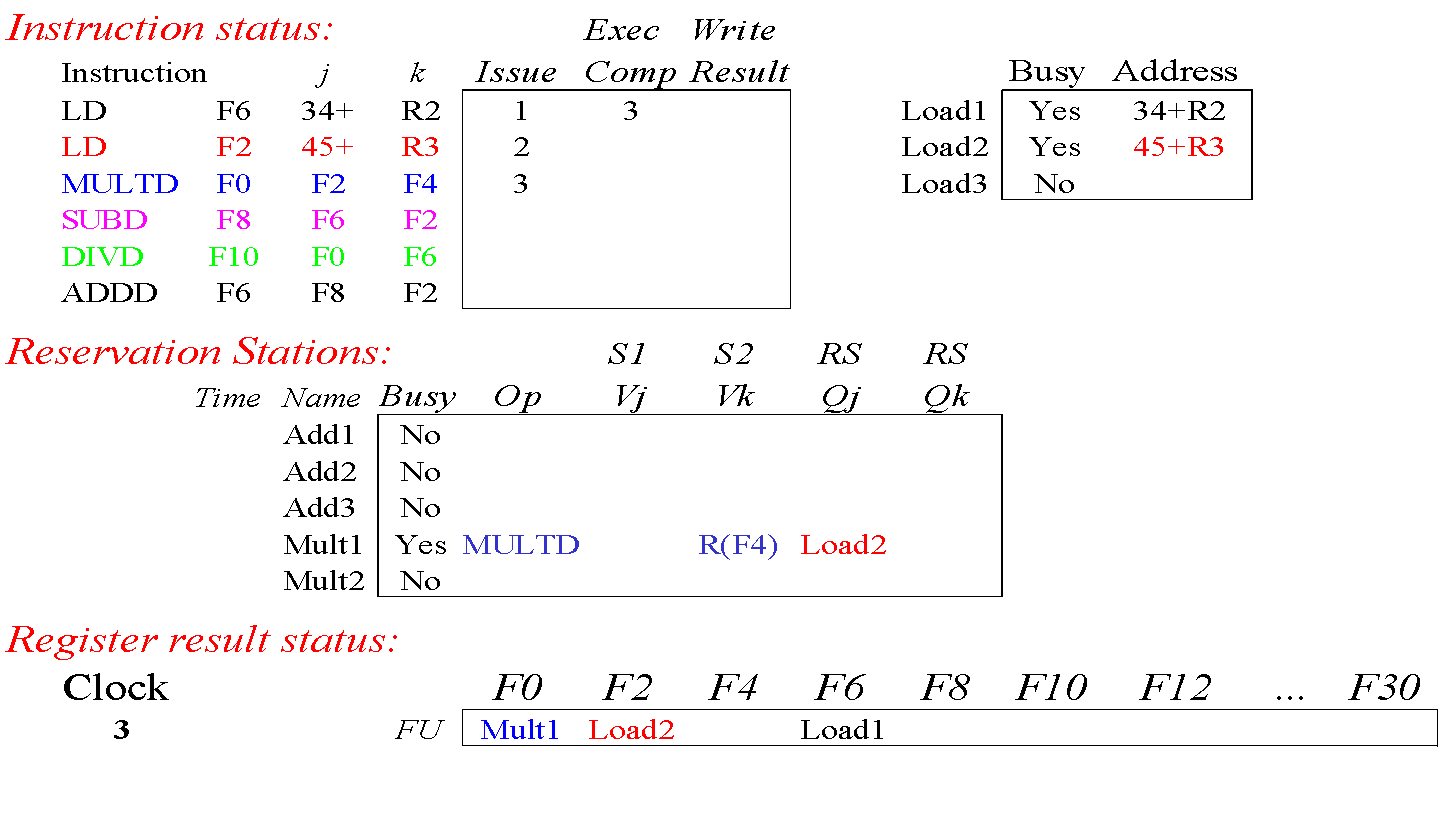
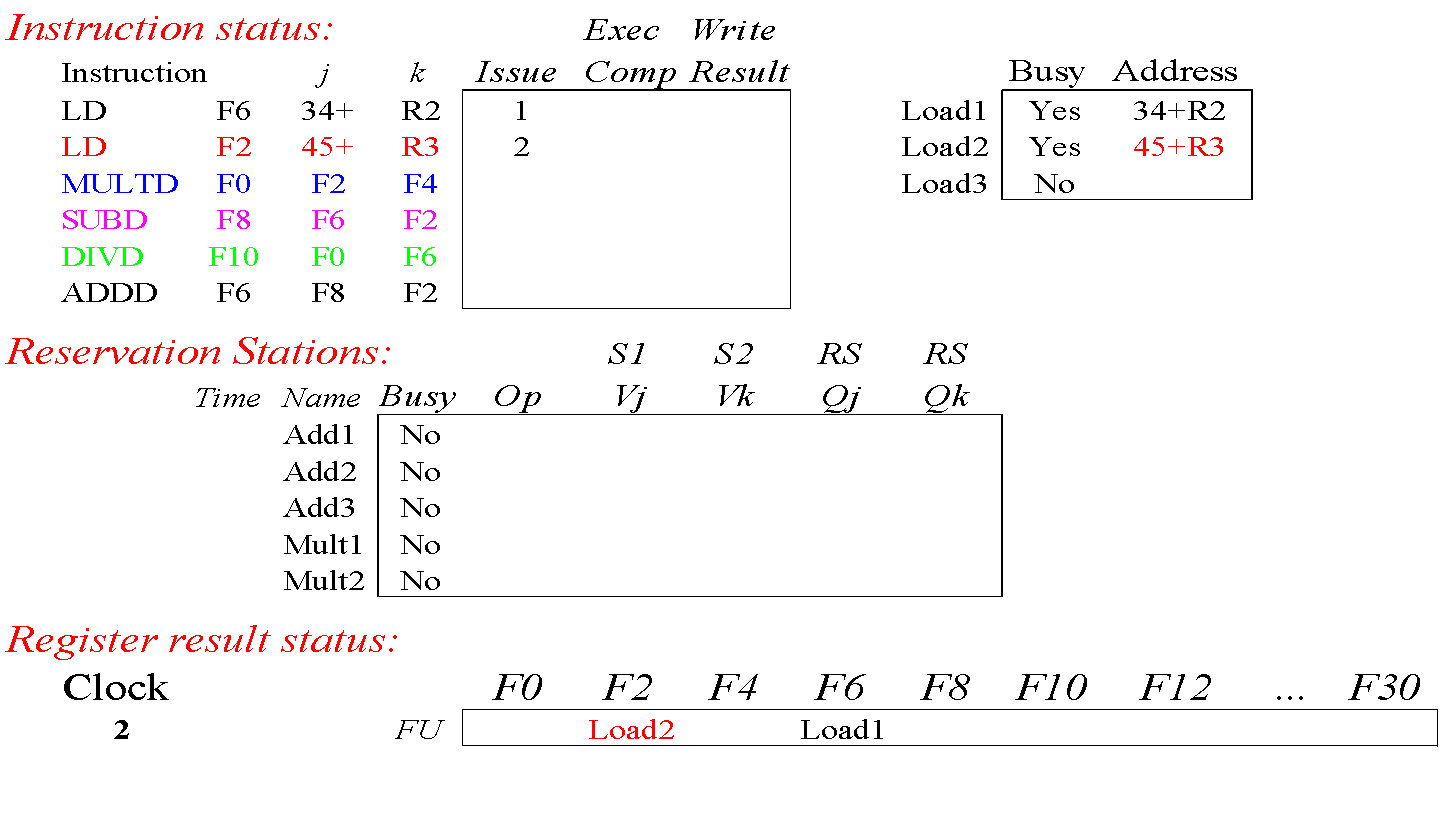
第三条指令来的时候由于F2还在由上一条指令获取,因此此时qj嵌入load2(保留站编号)。因此此时mult1不能执行

sub同理,由于load2没有执行完毕,f2无法获得,需要暂存在保留站中
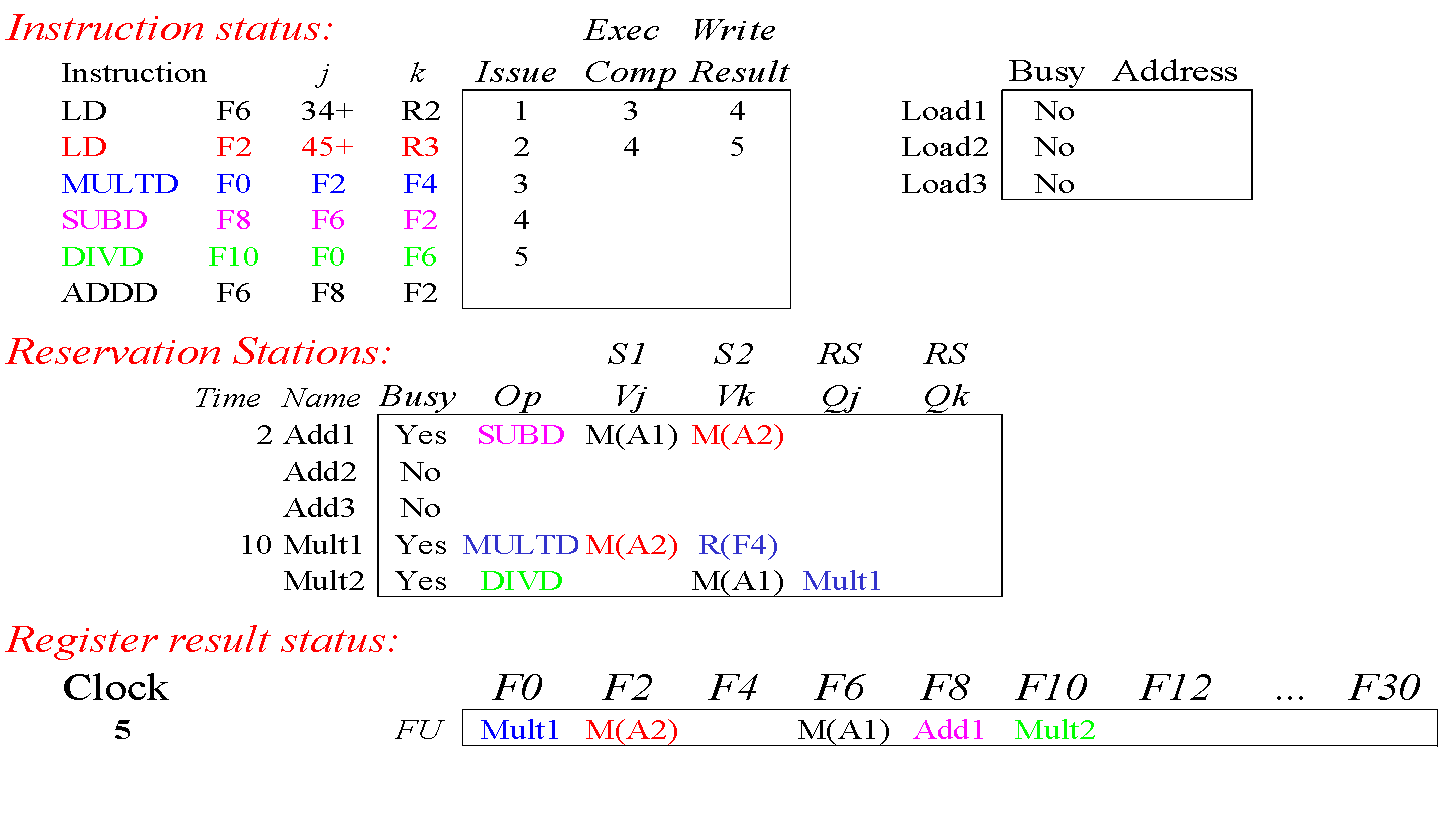
这一周期写入div指令,并且load2执行完毕,因此register result status表项释放,并且保留站中标号为load2的表项都释放并且填入对应值,此时sub可以执行
之后按照上面所述步骤执行下去
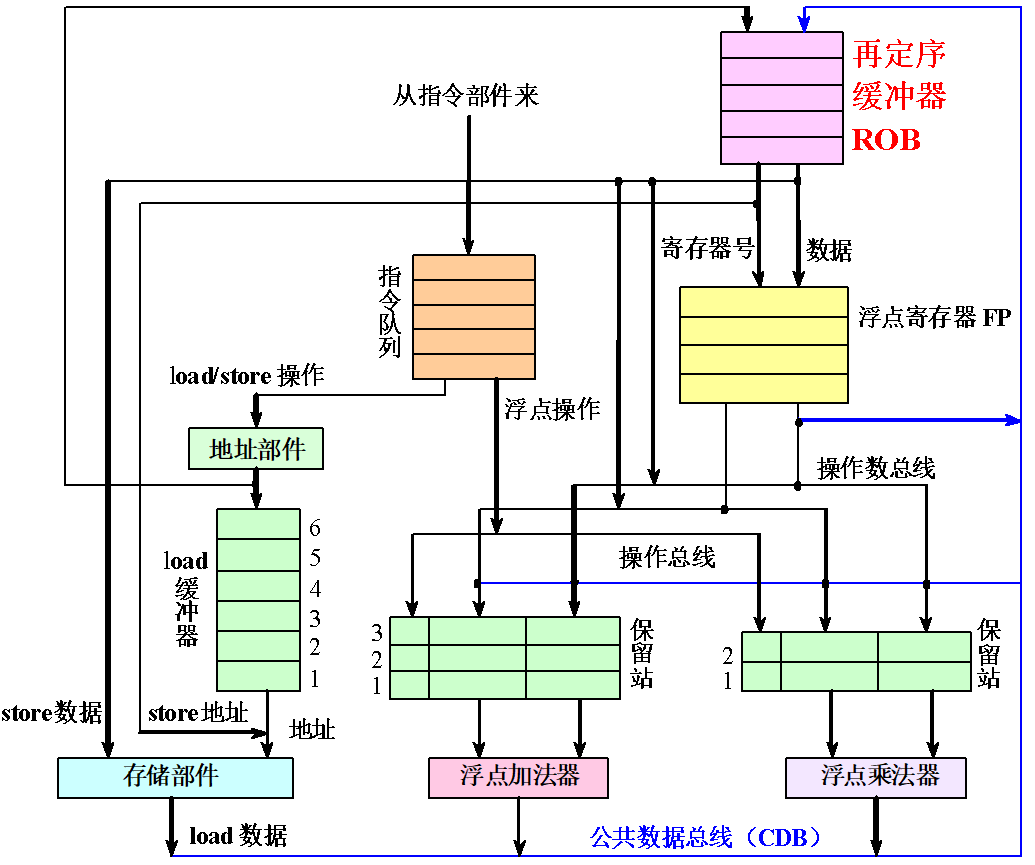
重排序缓冲器(ROB)
前面说的tomasulo算法特点是顺序发射,乱序执行,乱序提交。但是这种方式给精确异常带来了极大的挑战。精确异常也就是处理完异常后可以恢复原来的状态,即处理完当前指令异常后可以无障碍执行下一条指令。但是在乱序提交的情况下,下一条指令可能先于当前指令提交。为了解决这个问题,提出了ROB。
添加ROB的tomasulo算法特点是顺序发射,乱序执行,顺序提交。
每次从指令队列发送到保留站时同时在ROB中申请一个编号,此时寄存器结果状态表中存放的ROB的编号而不是保留站编号。
执行完毕后先将结果写入重排序缓冲器中,然后从队首开始将结果依次写入寄存器堆中。如果遇到分支预测错误或者精确异常,只需要清空他们后面的指令即可,也就是说如果在退休时遇到这两种情况清空ROB重新取指。如果遇到中断,则还需要获得当前最后一条未退休的指令地址,然后再清空ROB。
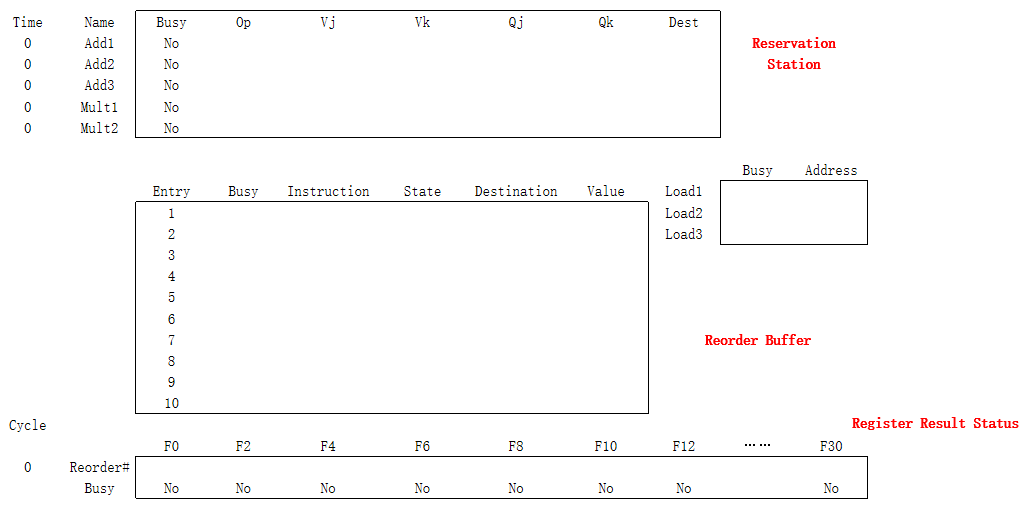
ROB字段:
- busy: 是否使用
- instruction: 指令
- destination: 结果
- value: 值
此外ROB还需要一个开始和结束指针,他是一个队列的结构